臻识系列相机主辅配置
添加主辅机配置需在同一个局域网内,用网址登录相机IP进行设置。支持最多一台主机三个辅机。辅助相机无需配置高级参数仅抓拍或开闸使用,上传和接收服务器指令均由主相机作用,辅助相机仅与主相机互通即可。
配置的相机软件版本需一致或相近,软件版本不同可能导致主辅机无法工作。设备维护—>设备信息查看相机软件版本,若不同需从臻识网站下载更新。

一.开启联动模式
高级设置—>联动管理软件版本较老的,联动管理在停车场配置中切换tab页。
勾选开启联动模式,点击**“确定”**按钮
弹出“修改模式设备将重启,是否继续?”提示,点击**“确定”**
相机会自动重启。主辅相机都需要此操作。

二.添加主辅相机
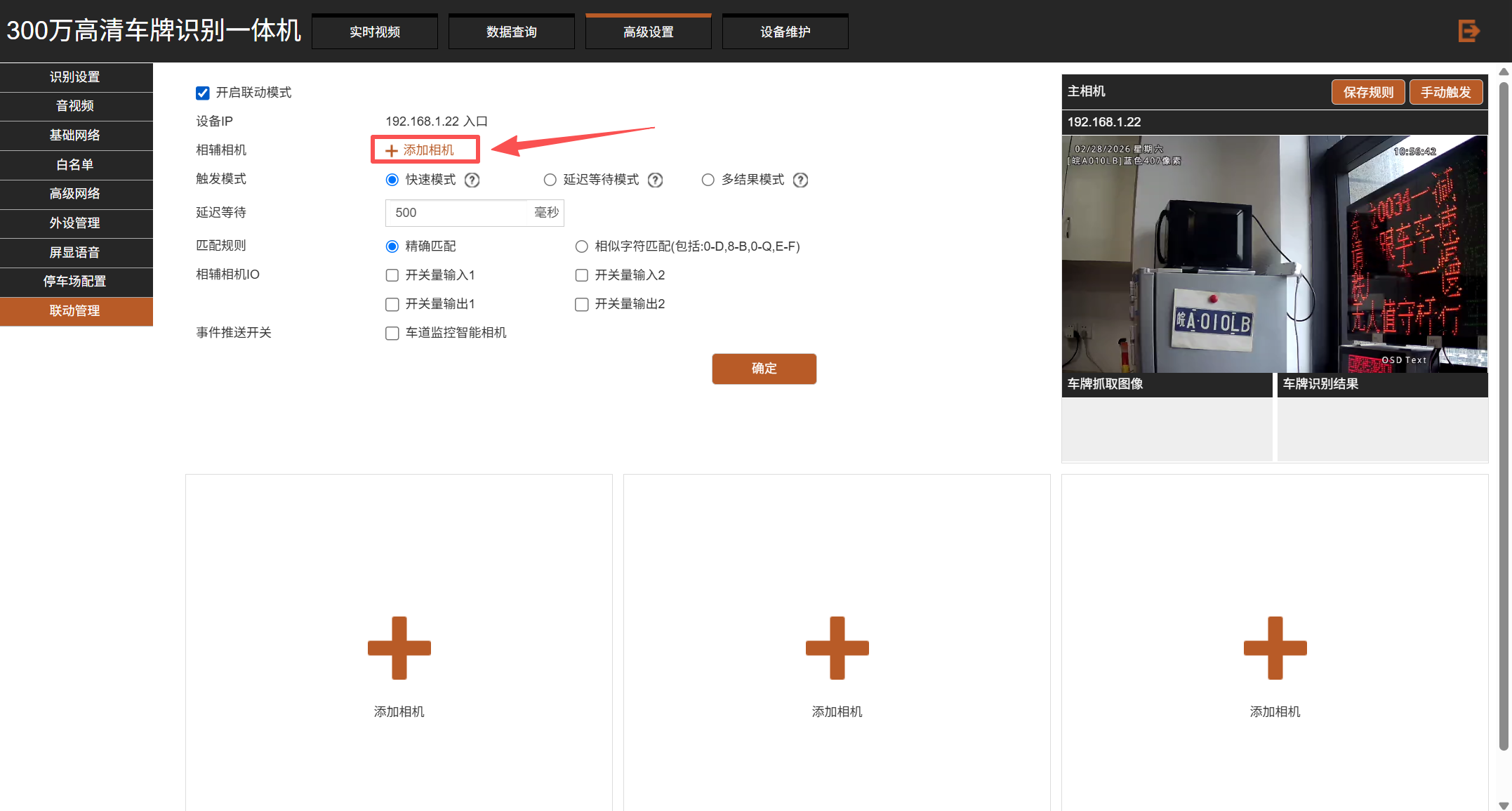
相机重启完成后,再次进入主机网页高级设置—>联动管理。
点击**“+添加相机”**
选中要添加的辅助相机,点击**“绑定”**

根据辅机IP的字体颜色,绿色为通讯正常,灰色为通讯断开,检查主辅相机网络连接及软件版本。

三.触发模式
1.快速模式:模式下方设置延迟等待时间(单位毫秒,1秒等于1000毫秒),主辅机其中一台先识别到车牌时,立即上传。在延迟等待的时间内,其他相机若也拍到相同车牌,则不上传,拍到不同车牌则立即上传。超过延迟等待时间则算下一轮触发。
此模式反应速度快,没有延迟,因主辅相机抓拍角度不同,不正对来车方向的车牌容易抓拍错,导致有一个错误结果上传。可通过调整相机识别“车牌像素限制”的数值范围及虚拟线圈,控制不正对车牌的相机不抓拍像素不足的车牌。若无法调整,不建议出口使用,容易因识别错误放行需缴费车辆。
2.延迟等待模式:模式下方设置延迟等待时间,在延迟等待时间内,各相机识别到的所有车牌进行对比,延迟等待时间结束,上传最清晰准确的结果。
此模式反应速度慢,有延迟,抓拍准确率高。一般出口选择此功能。
3.多结果模式:模式下延迟等待时间不生效,所有相机抓拍到结果都立即上传。
一般为脱机或者内部车场使用,仅追求抓拍开闸。会产生大量垃圾数据。
四.匹配规则
1.精确匹配:主辅机抓拍的结果完全一致,方确定是同一车牌
2.相似字符匹配(包括:0-D,8-B,0-Q,E-F):快速模式及延迟等待模式下,每轮触发的车牌仅对应相似字符不同的,认为是同一车牌
五.相辅相机IO
由辅助相机开关量输入输出是否接线和启用决定。开启对应按钮则辅助相机也接受触发或者输出开关量信号。